Device description
The Airnet II Particle Sensor from Particle Measuring Systems measures particle concentration with two channels and two measurement ranges.

Important: Please consult the Airnet II user manual for further details. |
Network configuration of the device
The Airnet II is to be connected via Ethernet connection to the network.
To add the Airnet II into the RMS, it is necessary to know the individual network configuration of the device
oIP address (fix) or Hostname (DHCP)
Note: A software and a separate service cable are required for network configuration. Rotronic recommends strongly to use the fixed IP address for the device as well as for the RMS-Converter. |
Creation of the modbus driver for the Airnet II
Please see also the chapter Modbus Editor - Integration of Modbus TCP products into RMS
Step 1 |
Create a new Modbus device by clicking the Plus sign
 |
|
Step 2 |
Set checkmark to Write single coil and Set the Byte Order / Data to High
 |
|
Step 3 |
Finish the modbus driver file and save it. An example of possible addresses to read out is shows below: 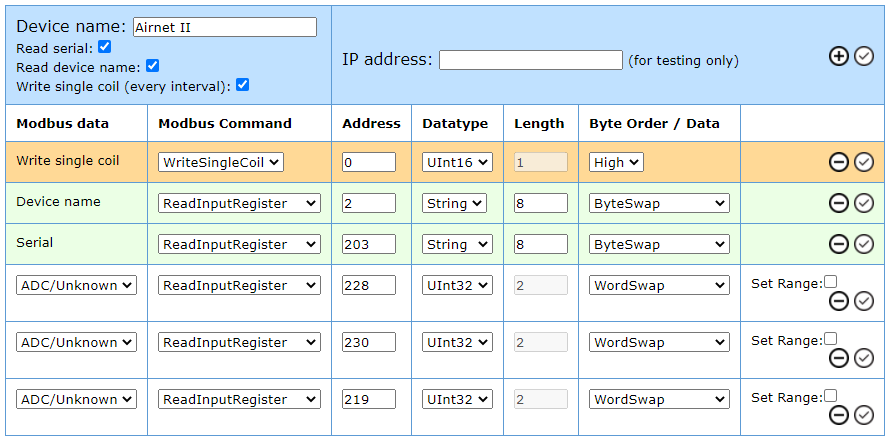
Address 0 - Start data collection (write single coil) Address 2 - Device name Address 203 - Serial number Address - 228 to 230 Particle measurements Address - 219 Status of measurements (the first three bits of this register represent the status of measurement conditions laser, flow and hardware of the Airnet II particle sensor).
|
Integration into RMS via the RMS-CONVERTER-100
Step 1 |
Log in to the RMS software. Select "Tools" > "Setup" > "Devices". Select the RMS-CONVERTER-100 and click on "Add/Search" devices:
 |
Step 2 |
Select the device type in the drop down menu. (The name is defined in the modbus driver - see below)
Type the IP address or host name into the "IP address" field.
IMPORTANT: If the field stays empty, RMS will not search automatically.
|
Step 3 |
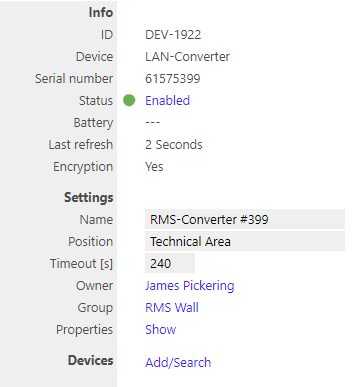
The Airnet device properties appears. Please define interval, group and configure the remaining properties as according to your modbus driver.
NOTE: The interval cannot be shorter than the interval of the RMS-CONVERTER-100.
IMPORTANT: If all check marks for measurement points are not set during initial installation and you wish to expand it later, then the same device needs to be added again with the same identification and IP address (there is no need to delete the device before adding it). The desired check marks can then be set. After completing this process, the added or updated measurement points will appear.
NOTE: If settings are changed with another software further to the initial installation into RMS, then RMS will not note the change. However, such a change would cause RMS to not work correctly. |
Step 4 |
The device is added.  |
Functionality within RMS
The Airnet II particle sensor appears in the chosen group of the RMS and the system starts to monitor the particle concentration.
Note: In case of communication or power interruption, only the RMS-Converter is able to log data and transfer later on into the RMS. The precondition is a successful communication between the RMS-Converter and the Airnet II particle sensor. If any power or communction interruption occures in between these devices, data gaps will appear and cannot be closed by this setting. |